
一种轻型碳纤维爬索机器人及其检测系统研究
2018-08-28 17:47:29
作者:王晓琳,陆绍辉,李东平,覃华桥,黄汉斌,雷国肇,王雄彪 来源:柳州欧维姆结构检测技术有限公司,广西 柳州 545006
分享至:


0 引言
拉索是拱桥、斜拉桥、悬索桥等索类桥梁的核心构件之一 . 拉索长期暴露在空气中,经风吹雨淋、日光照射、紫外线照射、人为损伤等因素影响,存在着外 PE 护套、内部钢丝束或钢绞线损伤等病害 [ 1 ] . 另一方面,由于风雨振等因素,拉索内部的钢丝束相互摩擦,引发钢丝磨损,严重者也会发生断丝现象 . 拉索的工作状态是桥梁是否处于安全状态的重要标志之一 [ 2 ] . 定期对拉索体系进行检测是有必要的 .
以往在工程中常采用卷扬机拖动检修车的检测方式或采用登高车对拉索的人工检测方法 . 该类方法容易对拉索 PE 保护层造成破坏;且检测人员处于高空作业,容易造成安全事故,而且需要封闭交通 . 随着机器人技术的进步,开发用于桥梁拉索检测的智能机器人, 成为了必然 . 近年来上海交通大学 [ 3 ] 、 东南大学 [ 4 ] 、武汉桥科院 [ 5 ] 等高校、科研院所均对爬索机器人进行了研发,但普遍存在着自重大,续航差,需要外接电源等问题,不能满足快速检测的工程应用需求 .

本文研究的爬索机器人通过对设计材料的改进,采用自重很轻的碳纤维材料,保证了机器人的续航能力,且方便现场安装 . 通过增加索力检测装置,爬索机器人携带无线加速度传感器到拉索中间部位后再测量拉索索力,该方法比原先在拉索预埋管上部安装加速度传感器测量索力更为精准 . 机器人搭载高清摄像装置,可实现拉索表面和桥塔拉索连接处病害的外观检测 . 自带的漏磁检测设备可以对拉索内部锈蚀断丝进行精准检测 .
1 爬索机器人及其检测系统研制
1.1 系统整体结构
爬索机器人包括一对主动轮和一对从动轮,采用双边夹紧 4 轮双电机驱动形式 . 利用两半式轻型碳纤维框架结构,通过 4 对联接臂进行联接,不仅方便在拉索上装卸,而且还可根据拉索不同直径进行调整 . 用拉伸弹簧和摆臂支撑组成柔性压紧机构,始终保持每对滚轮夹紧索体形成爬行所需摩擦力 . 主、从动轮设计为 U 形,可增大接触面,自行对中纠偏 . 并根据不同规格拉索,配套相应规格尺寸的轮子 . 爬索机器人上、下两端面四周共有 4 对支撑万向滚轮,能防止轮体偏离索体造成锁死现象 . 在机器人的前端和尾部均安装有红外测距装置,防止机器人在运行中撞击拉索两端预埋导管而损坏,将拉索检测仪器安装或搭载于爬索机器人上,利用高能锂电池作为供电电源,提升机器人的续航能力,通过操作控制单元配合各子系统实现桥梁拉索 PE 外观、内部断丝锈蚀检测以及拉索索力测量 . 爬索机器人示意图如图 1 所示。
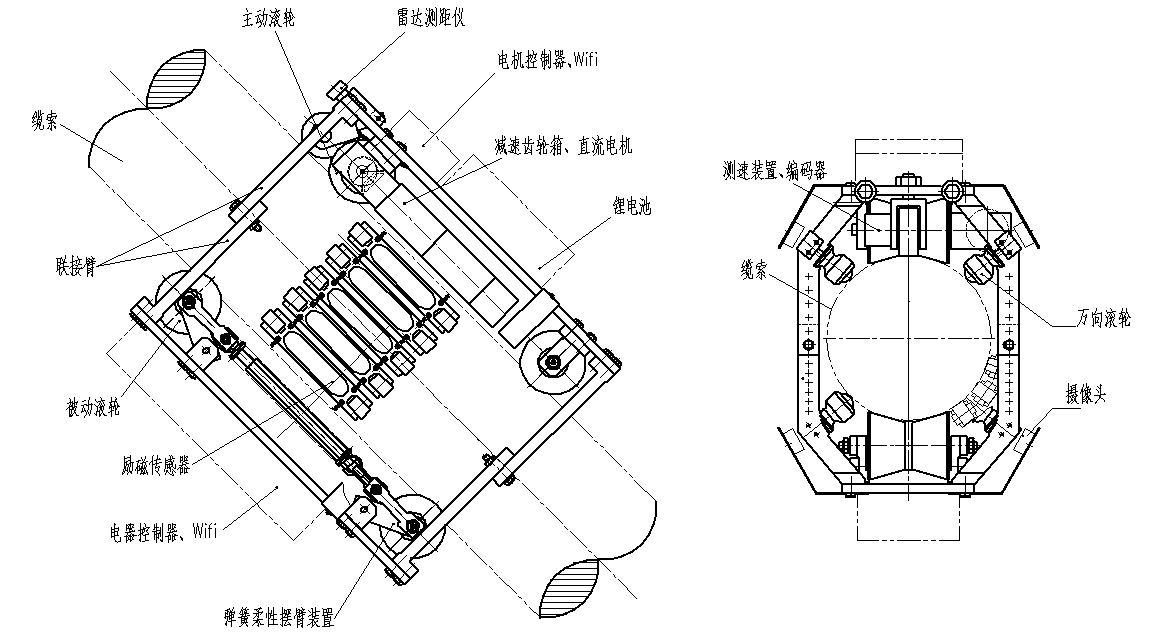
图 1 爬索机器人示意图
使用时,根据被测拉索直径的大小来相应的调整联接臂及拉伸弹簧的距离,以提供适合爬行所需的摩擦力 . 爬索机器人可按照上位机软件系统的指令以及设定的速度在拉索上运行,当到达拉索末端时能自动返回 . 还能在拉索上通过地面控制自由地移动并到达检测人员所要观测的位置,以便进行局部更加细致的观察和索力测量 . 利用视频采集单元采集拉索外部 PE 保护层表面全方位的高清视频图像,用漏磁法拉索锈蚀检测单同步进行拉索内部断丝锈蚀检测,采用高分辨率编码器准确的定位拉索病害位置,通过无线传输信号到桥面上位机 . 再由上位机软件系统自动识别出 PE 损伤面积,断丝锈蚀状态及病害位置 。
1.2 动力装置设计
机器人在缆索上运动由两副( 4 只)滚轮提供对缆索的附着力,机器人的全部重力(自重和载重)由这 4 只滚轮承载 . 设机器人处于静止状态,分别考虑垂直吊杆监测和有一定角度的斜拉索检测时,对一只滚动轮进行受力分析 . 如图2 所示。
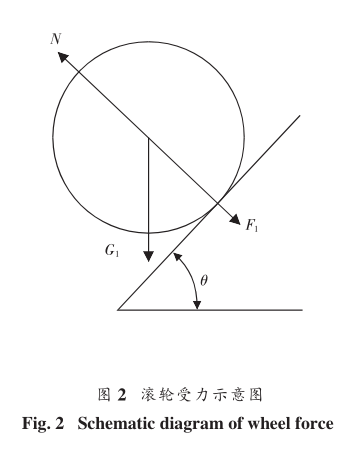
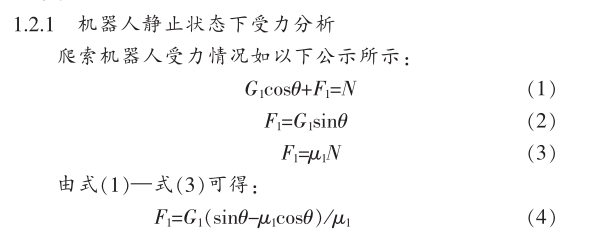
式中: F 1 —— — 由弹簧系统提供的附着力; G 1 —— — 单只滚轮承载的重力; θ —— — 缆索倾斜角度; μ 1 —— — 最大静摩擦因数; N —— — 拉索对滚轮向上的反力
取 F 2 =250 N ,减速机传动效率 η=0.8 ,电机储备系数 K=1.25. 并考虑外观检测,视频拍摄的稳定性,设置爬升最快速度 V max =12 m/min. 可以得到 P′=40 W. 参照设计所用设备参数,并考虑 3 倍 ~4 倍的安全系数,可以计算出最大电机功率 P max =160 W.
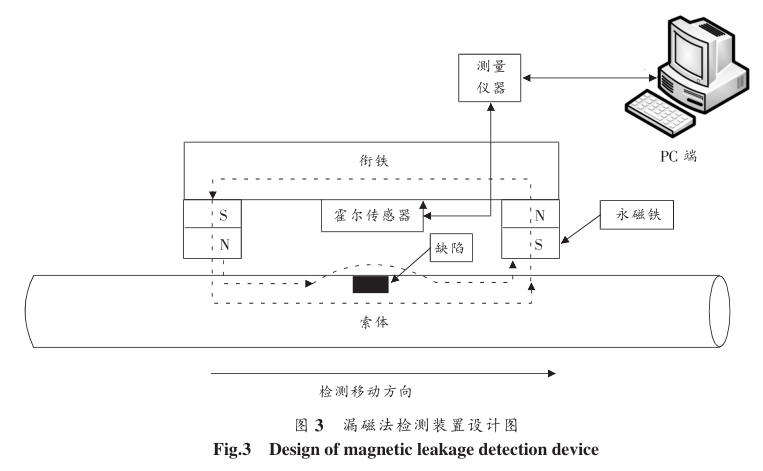
1.3 漏磁检测装置目前最常采用的拉索断丝锈蚀检测方法有磁滞伸缩导波法 [ 6 ] 、漏磁法 [ 7 ] . 本文所设计爬索机器人采用多套漏磁装置实现对拉索索体内钢绞线或平行钢丝缺陷进行检测 . 漏磁法检测装置设计图如图 3 所示,主要由衔铁、永磁铁、霍尔传感器等部件构成 .
其测量原理为衔铁、永磁铁、被测拉索构成磁化回路,当励磁装置将拉索磁化到饱和状态并相对拉索轴向扫描,当拉索存在断丝或腐蚀等缺陷时,会导致拉索内部磁场发生变化,部分漏磁信号在空气场中,霍尔传感器即可检测到相应的漏磁信号,通过对漏磁信号的检测与数据分析可获的拉索损伤量 [ 8 ] .
本文设计的单节励磁传感器用 2 只尼龙滚轮与拉索表面接触,其直线移动由滚动完成,避免对 PE 造成损害 . 单节励磁传感器装置示意图如图 4 所示。
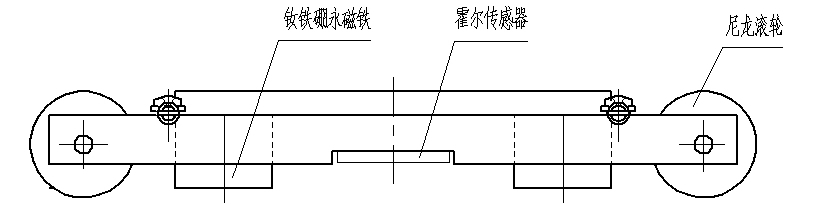
图 4 单节励磁传感器示意图
1.4 索力检测装置设计
目前通常采用的拉索索力检测常用的方法有压力环法、液压千斤顶拉拔法、磁通量传感法、以及振动频率法等测量方法 [ 9 ] . 振动频率法是一种间接测量索力的方法 . 依据索力与索的振动频率之间存在对应关系的特点,在已知索长、拉索两端的约束情况、分布质量等参数情况下,将高精度的加速度传感器安装在拉索上,采集拉索在环境振动激励下的振动信号,即可获得拉索的自振频率,然后由索力与拉索自振频率之间的关系计算出索力 [ 10 ] . 采集设备示意图如图 5 所示。

图 5 振动频率法采集设备示意图

由于受到检测条件的限制,通常的方法是将加速度传感器固定在拉索预埋管上部某位置,但该位置高频成分占主导,测试信号低阶频率不突出而高阶谐振峰值很大,不利于低阶频率的获取 . 加速度传感器最为理想的安装位置应是拉索的 L/4 或 3L/4 处, 因为这样传感器可以避开了支撑点和低阶振型的反弯点,各阶频率对应的幅值比较明显 [ 11 ] .
本文所采用的方法是将无线加速度传感器搭载在爬索机器人上,通过机器人将传感器爬升到拉索的 L/4 或 3L/4 处, 通过抱死装置确保机器人和拉索处于一体的状态 . 在机器人处于静止状态时再测量拉索索力 . 因机器人本身重量相对拉索重量来说很轻,故机器人自重对测量结果影响较小 .
1.5 控制系统设计
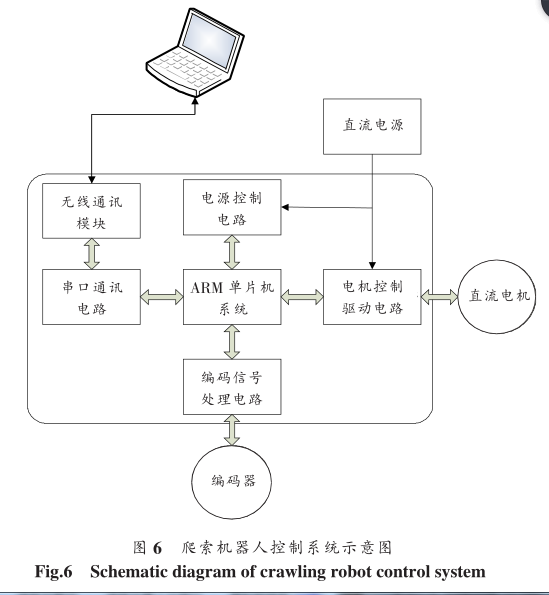
爬 索 机 器 人 控 制 系 统 采 用 ARM 内 核CORTEX 家族 STM32 系列 CPU 根核心, 控制系统框图如图 6 所示,桥面检测控制台电脑可以通过无线模块与串口通讯电路与单片机系统进行通讯,传送控制爬升机正向运转、反向运转指令,高、中、低三档速度的控制指令,以及传送行程位置、电池电压和电流的实时数据 .整个系统按功能分为 5 个部分: 单片机系统、编码信号处理电路、电机控制驱动电路、串口通讯电路、电源控制电路 . 如图 6 所示 .
1.6 上位机软件设计
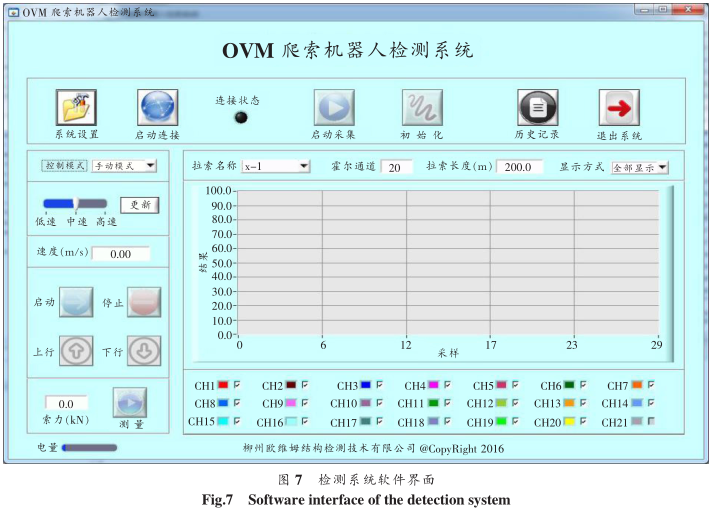
采用美国 NI 公司的 labwindows 平台开发的套远程检测软件,可以利用电脑终端无线采集索力、锈蚀断丝数据,并通过 labwindows 平台的 Vision Software 对采集到病害外观影像资料进行分析处理 . 软件界面如图 7 所示。
2 试验及工程应用
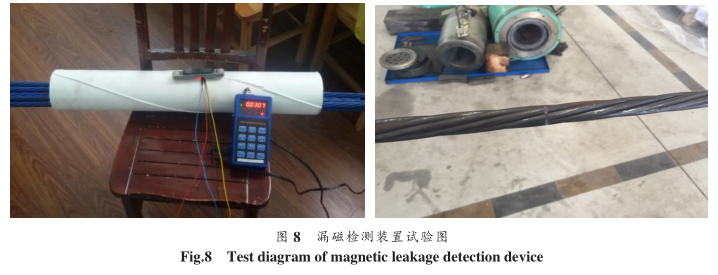
2.1 漏磁检测装置锈蚀断丝检测试验
在柳州欧维姆实验室对拉索断丝锈蚀检测装置进行了试验, 分别对完好拉索和有损伤的拉索进行了检测 . 如图 8 所示,通过实验,能够准确检测出损伤部位 . 试验验证采用该方法对拉索断丝锈蚀监测的可行 . 但拉索 PE 外护套导致磁信号有一定的衰减 . 理论上,随着永磁铁的磁场强度的增大,可以实现大规格索体的断丝检测 . 但考虑到断丝锈蚀检测装置的自重,以及配套爬索机器人的使用 . 无源机器人的检测方式超过 180 mm索径的拉索就比较难实现;但可以采用有源的脉冲信号激励的方式进行检测 . 本文所设计机器人在拉索上最大运行速度为 12 m/min ,完全满足了励磁装置对拉索结构的磁化时间,以及霍尔传感器采集的响应时间。
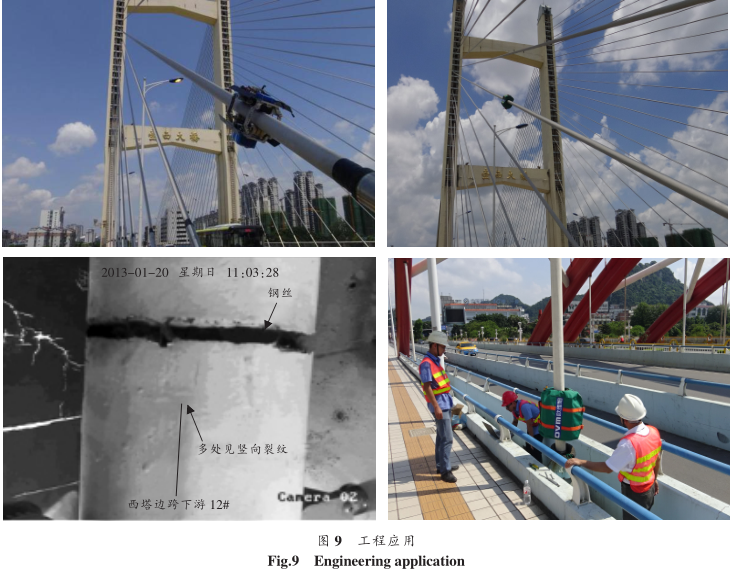
2.2 工程应用
研究所设计机器人分别在柳州文惠大桥、柳州壶西大桥、江西赣东大桥、桂林南洲大桥等桥进行了实际的试验与检测 . 通过试验验证,其工作速度最大可达 12 m/min ,平均的检测速度为 10 m/min. 最大承载能力为 120 kg ,爬升斜度在 0 °~90 ° 范围内可调,最大续航 2 000 m. 最远无线传输距离为 500 m. 如图 9 所示。
3 结论
本文设计的爬索机器人经过厂内和现场试验,得出了以下结论:
1 )采用轻型碳纤维材料、直流电机和减速齿轮箱、锂电池的轻型构建的爬索机器人极大降低了自重,提高了续航能力,实现了在不外接电源的情况下,安全、快速、便捷的检测拉索病害 .
2 )采用漏磁法检测拉索断丝锈蚀的方法,能够实现小直径的拉索检测,对大直径的桥梁拉索,受永磁铁自重的影响,不能完全对索体进行磁化,不能精准的检测 . 后续可研究以脉冲的磁化方式进行断丝锈蚀测量 .
3 )通过爬索机器人携带无线加速度传感器到拉索自由段中间部位后再测量拉索索力,该方法比原先在拉索预埋管上部安装传感器测量索力更为精准 .
4 )在机器人前部搭载高清摄像头也可以实现对桥塔和拉索连接部位外观的检测 .
5 )钢绞线拉索外部有环氧、 PE 和油脂等四重防护,且钢绞线之间有空气间隙,检测时会比钢丝成品拉索误差更大 .
参考文献
[ 1 ] 吴振, 龙跃, 章陈瀑 . 持荷状态下钢绞线腐蚀及性能退化研究[ J ] . 广西工学院学报, 2011 , 22 ( 1 ): 23-26.
[ 2 ] 杨少军 . 桥梁拉索体系损伤的检测和监测方法[ J ] . 公路交通技术, 2005 ( 3 ): 130-134.
[ 3 ] 罗均, 吕恬生, 张家梁,等 . 缆索维护机器人系统的研制[ J ] . 上海交通大学学报, 2000 , 34 ( 3 ): 360-362.
[ 4 ] 徐丰羽, 王兴松, 许家林 . 双边轮式斜拉桥悬索检测机器人设计与分析[ J ] . 东南大学学报(英文版), 2009 , 25 ( 1 ): 41-46.
[ 5 ] 汪正兴, 王波, 王翔,等 . 桥梁缆索的检测系统: 103194967A [ P ] . 2013-07-10.
[ 6 ] 邹易清, 武新军, 蒋立军,等 . 拉索断丝磁致伸缩导波检测信号特性实验研究[ J ] . 广西科技大学学报, 2017 , 28 ( 2 ): 85-88.
[ 7 ] 丁忠平, 康宜华 . 无损检测中的漏磁法原理与实践[ J ] . 电测与仪表, 1995 ( 6 ): 15-18.
[ 8 ] 杨叔子, 康宜华 . 钢丝绳断丝定量检测原理与技术[ M ] . 北京:国防工业出版社, 1995.
[ 9 ] 王晓琳,李东平,邓年春,等 . 边坡预应力锚索索力检测方法比较研究[ J ] . 科技创新导报, 2015 ( 24 ): 100-101.
[ 10 ] 王建飞 . 拱桥吊杆索力的振动法测量[ D ] . 哈尔滨:哈尔滨工业大学, 2012.
[ 11 ] 韩宗泽 . 频率法测量索力的研究[ J ] . 天津建设科技, 2013 , 23 ( 2 ): 57-59.
免责声明:本网站所转载的文字、图片与视频资料版权归原创作者所有,如果涉及侵权,请第一时间联系本网删除。
相关文章

官方微信
《中国腐蚀与防护网电子期刊》征订启事
- 投稿联系:编辑部
- 电话:010-62313558-806
- 邮箱:fsfhzy666@163.com
- 中国腐蚀与防护网官方QQ群:140808414
点击排行
PPT新闻

“海洋金属”——钛合金在舰船的
点击数:5768

腐蚀与“海上丝绸之路”
点击数:4763